- românesc
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC Explicat: Funcții, Tipuri și Aplicații
Catalog

Explorarea PMIC
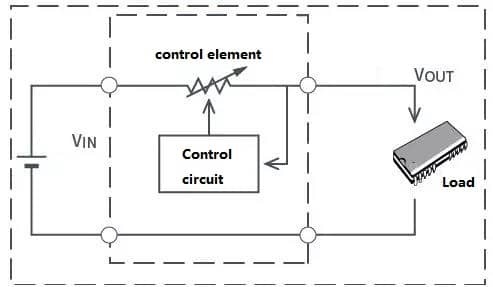
Un PMIC (Circuit Integrat de Gestionare a Energiei) este un circuit integrat dedicat care acceptă una sau mai multe intrări de energie și produce mai multe căi de alimentare reglate și controlate pentru diferitele sarcini de pe o placă. Aceste sarcini includ adesea procesoare, memorie, secțiuni RF, senzori și diverse periferice.
În loc să răspândească regulatoare discrete și circuite integrate de supraveghere în întreaga proiectare, un PMIC le consolidează într-un singur manager de domeniu de alimentare coordonat. Pentru multe echipe, această consolidare aduce de asemenea o anumită liniște sufletească în timpul inițializării, deoarece există un singur loc de verificat atunci când căile se comportă ciudat.
Procesoare, memorie, blocuri RF, senzori și alte sarcini.
Domeniul funcțional
În produsele reale, contribuția unui PMIC depășește cu mult conversia de tensiune. Beneficiul practic apare atunci când acesta se comportă ca un coordonator de putere la nivel de sistem care leagă împreună mai multe responsabilități care interacționează în mod natural în timpul boot-ului, pașilor de sarcină în timpul funcționării și condițiilor de defect.
Conversie
Un PMIC poate combina diferite tipuri de regulatoare astfel încât căile de alimentare axate pe eficiență și căile de alimentare sensibile la zgomot să poată fi optimizate separat. În proiectele practice, principala problemă nu este adesea generarea tensiunii necesare, ci menținerea unei tensiuni stabile în timpul schimbărilor de sarcină, a evenimentelor de pornire și a altor condiții de operare solicitante.
Regulatoare buck, regulatoare boost, regulatoare buck-boost și regulatoare LDO.
O cale care arată curată la o sarcină constantă poate deveni vizibil stresată sub profiluri reale. Eficiența, ondularea, răspunsul tranzitor și rezerva termică sunt examinate de obicei cu atenție atunci când curentele de impuls ale CPU-ului, pulsuri de transmisie RF sau vârfuri de eșantionare a senzorilor sunt testate în condiții reale de operare.
Impulsuri CPU, pulsuri de transmisie RF și vârfuri de eșantionare a senzorilor.
Distribuție
După ce căile sunt generate, un PMIC dictează adesea cum sunt împărtășite, comutate și izolate. Aici este locul în care o proiectare poate părea fie robustă, fie fragilă, mai ales în timpul evenimentelor hot-plug, brownout și cele legate de cabluri. Când distribuția este gestionată cu atenție, curentul de pornire este controlat, căile de întoarcere sunt limitate, iar un defect este mai puțin probabil să se transforme într-o colapsare pe întreaga placă.
Activarea căilor, comutatoare de sarcină, limitarea curentului și ORing cu diode ideale pentru intrări cu surse multiple.
Detecție și supraveghere
Cele mai multe PMIC-uri integrează supraveghetori care monitorizează continuu starea căilor și oferă semnale pe care firmware-ul și hardware-ul le pot interpreta. Într-un laborator, aceste caracteristici încetează rapid să mai fie percepute ca elemente suplimentare frumoase și încep să pară ca diferența dintre o sesiune de debugging curată și o zi petrecută căutând un reset care refuză să se reproducă la cerere.
Monitoare de sub tensiune, monitoare de supratensiune, detecție de supracurent, detectare termică și semnalizare de putere bună.
O lecție care tinde să rămână cu echipele experimentate de aducere la viață este că pragurile de putere bună și temporizările de deglitch trebuie să fie fără ambiguități. Când acestea sunt vagi sau slab potrivite sistemului, rezultatul este adesea resetări false sau eșecuri de boot fantomă care apar doar în colțuri de temperatură, pe anumite baterii sau după o secvență de reporniri rapide.
Control și secvențiere
Un PMIC include frecvent mecanisme pentru a modela cum se ridică, coboară și se coordonează între ele. Aceste detalii apar ca rezultate concrete: dacă un sistem pornește într-un mod repetabil, dacă componentele se confruntă cu stres evitabil și dacă placa revine la o stare cunoscută după o defectare.
Secvențiere, pornire lină, modelare a rampelor, căi de descărcare și temporizări inter-railt configurabile.
Un sistem digital nu solicită doar tensiuni corecte în regimul stabil; se așteaptă, de asemenea, ca acele raile să sosească într-o anumită ordine și în relații de timp limitate. Dacă pantele sunt prea abrupte, prea lente sau pur și simplu greșit ordonate, structurile interne și domeniile pot ajunge în condiții nedefinite care sunt enervant de intermitente, mai ales în jurul comportamentului de retenție al SRAM-ului și al inițierii interfețelor de mare viteză.
Structuri interne ESD, domenii de retenție SRAM și interfețe de mare viteză.
Ce tinde să modeleze rezultatele în proiectele reale
Când o echipă trece de la un diagrama bloc la un prototip funcțional, selecția și configurarea PMIC-ului au adesea succes sau eșuează pe detalii operaționale mai degrabă decât pe specificații la nivel de marketing. Problemele subtile sunt cele care creează presiune asupra programului, deoarece apar târziu și rareori se prezintă ca o singură cauză evidentă.
Faceți față transienților rapizi și sarcinilor dinamice
Procesorii moderni și secțiunile RF pot solicita pași mari de curent pe intervale de timp de microsecunde. Un PMIC poate apărea perfect acceptabil pe hârtie și totuși să arate succesiuni, supratensiuni sau oscilații o dată ce bucla de control, metoda de compensare, rețeaua de ieșire și paraziții PCB-ului sunt forțați să interacționeze în designul real.
Supratensiuni, oscilații și oscilații.
Echipele care testează răspunsul la transienți devreme fac adesea acest lucru pentru că au simțit durerea de a-l descoperi târziu. Validarea timpurie poate reduce șansele unui ciclu neplăcut de reproiectare implicând inductoare, condensatoare de ieșire, componente de compensare sau chiar alegerea PMIC-ului în sine.
Inductoare, condensatoare, componente de compensare și PMIC-ul în sine.
Secvențiere ca un contract de sistem, nu ca o conveniență
Secvențierea puterii funcționează cel mai bine atunci când este tratată ca un contract între cerințele de siliciu, presupunerile firmware-ului și comportamentul plăcii. Când ratele de creștere și temporizările puterilor bune se îndepărtează de ceea ce se așteaptă fișa tehnică a procesorului sau ceea ce presupune implicit firmware-ul, apar probleme intermitente de boot.
Cerințele fișei tehnice a procesorului și așteptările firmware-ului.
Ceea ce face ca aceste probleme să fie deosebit de frustrante este tendința lor de a dispărea în condiții favorabile de banc și de a reveni în condiții extreme de temperatură, evenimente de hot-plug ale bateriei sau condiții de alimentare marginală. În acele medii, secvențierea deterministă și comportamentul predictable al resetării reduc surprizele și scurtează ciclice de depanare.
Colțuri de temperatură, evenimente de hot-plug ale bateriei și condiții asemănătoare unor brownout-uri.
Comportamentul de protecție ca un leaver pentru uptime și costurile de servicii
Limitele de supracurent, închiderile termice și protecțiile UV/OV sunt adesea discutate în limbajul siguranței, dar produsele utilizate le experimentează ca funcții de disponibilitate. Un PMIC care limitează curentul într-un mod grațios, raportând defectele cu suficientă claritate pentru a fi acționabile și recuperându-se într-un mod controlat poate preveni o defectare minoră a perifericului să se transforme într-o cădere completă a sistemului și un tichet de suport.
Mecanisme de protecție: Protecția împotriva supracurentului, închiderea termică, protecția împotriva sub tensiunii și protecția împotriva supratensiunii.
Beneficiile fiabilității sistemului: Limitarea grațioasă a curentului, raportarea defectelor și recuperarea controlată.
Este adesea mai precis, și sincer mai util în timpul compromisurilor de design, să ne gândim la PMIC ca parte a arhitecturii de fiabilitate a sistemului decât doar ca un convertor de putere. Design-urile care se maturizează bine tind să selecteze un PMIC bazat pe cât de constant aplică stări de putere previzibile în operațiuni normale, gestionarea defectelor și tranziții.
Când acest punct de vedere este luat în serios, detaliile care sunt ușor de minimizat în timpul planificării timpurii încep să fie văzute diferit în timpul integrării. Comportamentul descărcării railelor, integritatea semnalului de putere bună și telemetria defectelor devin trăsăturile care separă un dispozitiv care pur și simplu se pornește în laborator de un dispozitiv care pornește curat, repetat și previzibil pe teren, fără a cere echipei de inginerie să aibă noroc.
Categorii PMIC
PMIC-urile sunt adesea etichetate printr-o funcție principală, însă în hardware-ul de livrare tind să se comporte ca un subsistem de alimentare compact și coordonat mai degrabă decât ca un component cu un singur scop. O modalitate practică de a sorta tipurile de PMIC este de a privi (a) ce reglează, (b) ce restricționează sau impune și (c) ce conectează, deconectează sau activează. Din perspectiva activării sistemului, linia de demarcație care răsare constant este mai puțin despre liniar versus comutare și mai mult despre dacă PMIC-ul a fost construit pentru a gestiona interacțiunea de la șină la șină într-o încărcare în schimbare. Când acea interacțiune este gestionată cu atenție, plăcile se simt mai calme în timpul testelor de stres; când nu este, același design poate arăta bine pe o sursă de banc și poate deveni capricios într-un produs complet asamblat.
Grupuri Funcționale Principale
Aceste blocuri generează șine, setează puncte de operare și absorb schimbările în condițiile de intrare. Acestea acoperă, de obicei, totul, de la șine silențioase cu curent mic până la domenii digitale cu curent mare.
• Reglare liniară (LDO-uri)
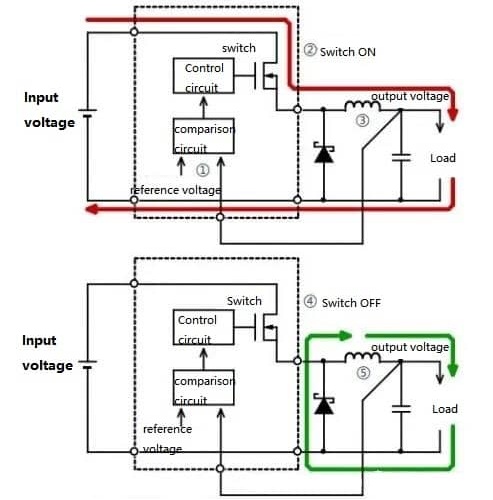
• Reglare prin comutare (buck, boost, buck-boost, inversor, pompe de încărcare)
• Conversie la front-end și pre-reglare (adaptoare AC/DC, etape de sink USB-PD, pre-reglatoare auto pe unele platforme)
Aceste blocuri conturează modul în care energia este permisă să se comporte prin definirea de praguri, observarea limitelor și reacția la defecțiuni. Acestea pot să nu livreze wați, dar adesea decid dacă un sistem eșuează curat sau eșuează în mod misterios.
• Referințe de tensiune și bandgaps
• Supervizoare, monitoare și comparatoare de fereastră
• Generarea resetării, temporizatoare watchdog și detecția sfaturilor la cădere
• Secvențiere, urmărire și reacție la defecțiuni (UV/OV, supra-currenți, reacție termică)
Aceste blocuri determină unde curge energia, când este izolată și cum sunt conduse sarcinile externe. În designurile reale, acestea sunt locurile unde cazurile limită, conectarea rapidă, căderea cablului, defecțiunile accesoriilor, tend să apară întâi.
• Managementul căii de alimentare
• Switch-uri de sarcină și eFuse-uri
• Încărcarea bateriei
• Șine și drivere legate de display
• Driverele porții MOSFET
Tipuri de Reglare/Conversie
LDO-urile sunt adesea selectate atunci când zgomotul de ieșire scăzut, fluxul de design simplu și comportamentul rapid al semnalelor mici sunt dorite. Acestea apar frecvent pe blocuri RF, șine audio, senzori de precizie și surse legate de referința ADC, unde spurii de ondulație pot deveni pierderi de performanță măsurabile.
Căldura este adesea factorul limitativ în performanța regulatorilor. Pe măsură ce diferența de tensiune între intrare și ieșire crește sau curentul de sarcină crește, disiparea energiei și temperatura pot deveni mai importante decât specificațiile de precizie electrică.
O șină de alimentare care pare stabilă în timpul testării pe banc deschis poate dezvolta probleme semnificative de încălzire în interiorul sistemelor închise sau în medii cu temperaturi ridicate unde fluxul de aer și marginile termice sunt reduse.
Convertorii buck suportă o mare parte din încărcătura pentru șinele centrale eficiente: procesoare de aplicații, DSP-uri, șine DDR și alte domenii digitale cu curent mare. În practică, două plăci care folosesc același buck pot avea comportamente foarte diferite în funcție de modul de control, modurile de operare la sarcină ușoară și parazisticile generate de amplasare.
• Abordare de control (mod de tensiune, mod de curent, histeretic, timp constant de activare)
• Comportamentul la sarcină ușoară (PFM, omisiune de impulsuri, PWM forțat)
• Răspunsul tranzitoriu versus compromisurile de ondulație a ieșirii
• Atitudinea EMI (opțiuni de spectru dispersat, alegeri de frecvență de comutare, sensibilitate la amplasare)
Un detaliu care tinde să ascută revizuirile de design este realitatea profilului de sarcină. Un convertor care arată excelent la 2 A poate petrece cea mai mare parte a vieții sale la 20–200 mA, unde tranzițiile de mod, pierderea de încărcare a porții și costurile de comutare domină. Comparând doar valorile de eficiență de vârf, se poate ajunge ca viața bateriei în operațiuni reale să devină mai rea decât s-a așteptat din estimările inițiale.
Convertorii boost sunt de obicei aplicați atunci când șina țintă trebuie să depășească sursa; exemple comune includ generarea de 5 V dintr-o baterie cu celulă unică, crearea de șine de polarizare pentru display sau alimentarea șirurilor de LED-uri. Topologiile buck-boost sunt preferate atunci când intrarea poate traversa deasupra și dedesubtul ieșirii dorite, cum ar fi menținerea unei șine de sistem stabilă pe întreaga curbă de descărcare a bateriei.
Acești convertoare deseori dezgroapă durerea de cap la nivel de sistem, cum ar fi menținerea unui domeniu de 5 V stabil în timp ce bateria se prăbușește, dar acea ușurare vine cu mai multe părți mobile: complexitate de compensație, comportamentul limitării curentului de comutare și EMI condus care poate fi surprinzător de sensibil la geometria plăcii și condițiile cablului.
În telefoane și module IoT mici, brick-ul AC/DC este de obicei în afara produsului, totuși negocierea front-end și protecția intrării ajung din ce în ce mai mult în interiorul dispozitivului. Chiar și atunci când o fișă tehnică promovează aceste caracteristici ca fiind caracteristici USB, mai degrabă decât caracteristici PMIC, acestea conturează puternic dimensionarea convertorului în aval, distribuția căldurii și stresul în cel mai rău caz.
• Detectarea și suportul negocierii USB-PD
• Limita de curent de intrare și controlul curentului de pornire
• Protecție la supratensiune pentru accesorii și adaptoare USB
Blocuri de suport de precizie
Referințele ancorează acuratețea pentru ADC-uri, DAC-uri și praguri de comparator. În produsele cu semnal mixt, detaliile care contează în mod repetat sunt comportamentul de deriva, densitatea zgomotului și PSRR în intervalul de frecvență relevant. Poate părea contraintuitiv, dar o mică cantitate de zgomot de referință poate apărea ca un jitter măsurabil, eroare de senzor sau ambiguitate a pragului odată ce este multiplicat de câștigurile și alegerile de filtrare din lumea reală.
Supraveghetorii monitorizează șinele pentru subtensiune, supratensiune și încălcări de secvențiere. În sistemele cu mai multe șine, ei ajută la evitarea stărilor semi-active în care un domeniu se activează și începe să execute în timp ce un alt domeniu este întârziat, în stare de brun sau oscilează.
Din punct de vedere al fiabilității, monitorizarea robustă tinde să reducă tipul de returnări intermitente din teren care frustrează pe toată lumea: probleme care apar doar în timpul pornirilor reci, lansărilor cu baterie descărcată, evenimentelor rapide de conectare și cablurilor de margine care nu au fost niciodată în „calea fericită” a laboratorului.
Secvențierea este mai mult decât șina A, apoi șina B. Se transformă într-o discuție despre stivele de toleranță la timp, pantele de rampă, relațiile de resetare și ce face sistemul când o șină ratează fereastra.
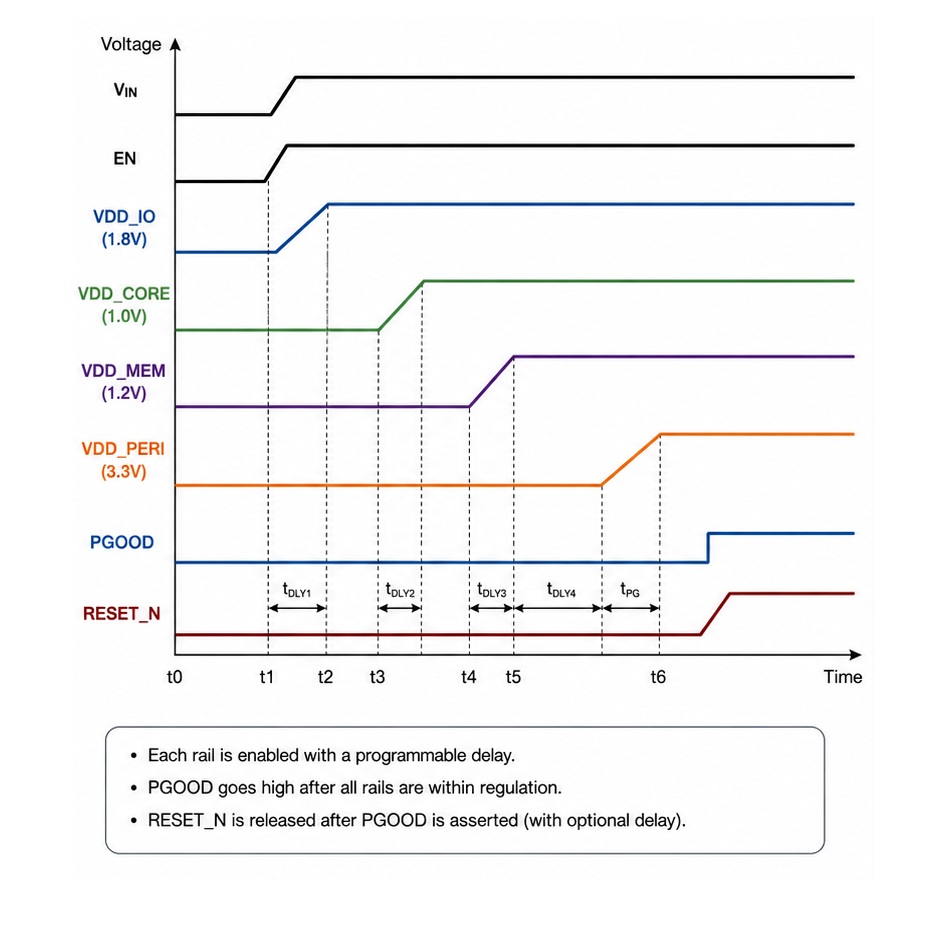
Documentația SoC specifică frecvent dependențele IO-înainte-de-nucleu, constrângerile de antrenare a memoriei și temporizarea precisă a dezactivării resetării. PMIC-urile cu secvențiere programabilă și pante controlate pot reduce logica externă de lipire și fac ca punerea în funcțiune să nu mai pară atât de intuitivă, mai ales atunci când plăcile sunt iterate rapid și mici modificări de timp pot salva zile de depanare.
Funcții de cale de alimentare și de acționare
Logica căii de alimentare decide dacă sistemul funcționează din USB, baterie, sau un amestec între ambele și influențează ceea ce se întâmplă în timpul tranzițiilor.
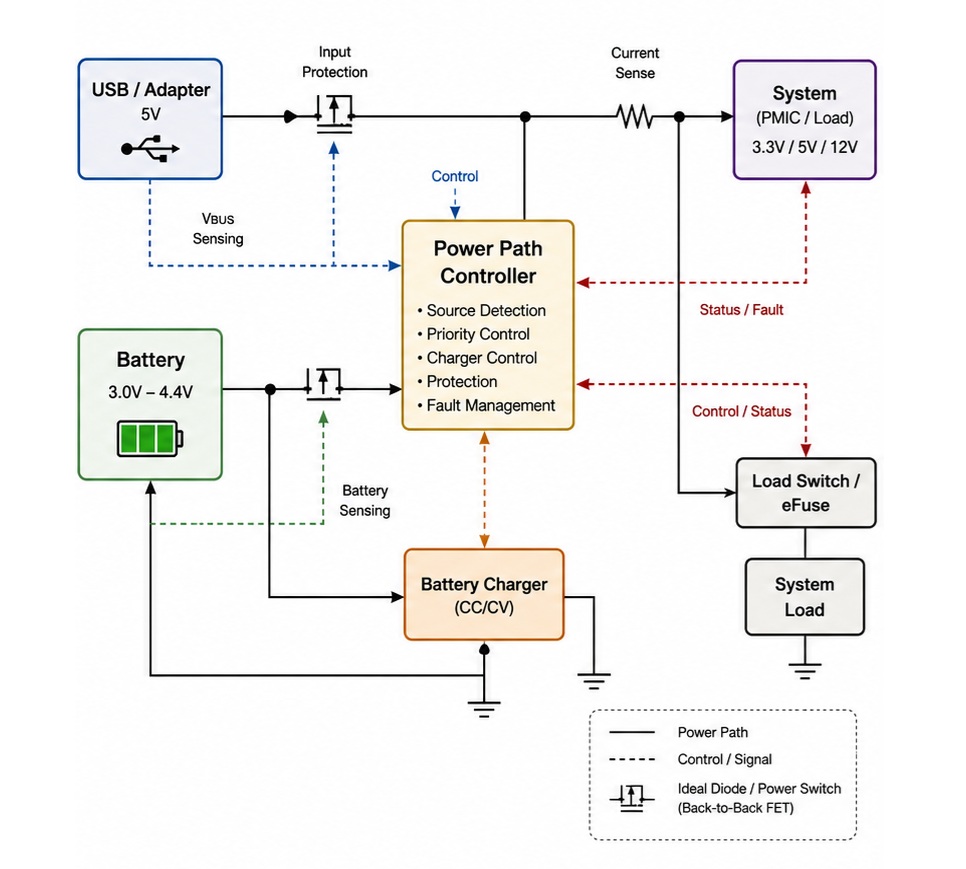
• Comportament de comutare fără întreruperi (limitând scăderile care declanșează resetări)
• Limitarea curentului de intrare pentru a se potrivi cu USB/adaptoare și cerințe de conformitate
• Comportament de diodă ideală pentru a reduce curentul invers
O capcană recurentă în lumea reală este subestimarea rezistenței în cabluri, conectori și elemente de protecție. În timpul unui transient rapid, PMIC-ul poate funcționa exact așa cum a fost proiectat și sistemul poate continua să aibă un declin deoarece calea din aval coboară mai mult decât modelul a presupus. Aceste eșecuri par „nejustificate” până când toată impedanța căii este măsurată și tratată ca parte a designului, nu ca o notă de subsol.
Încarcătoarele variază în suportul pentru chimia bateriei, topologia circuitului, caracteristicile termice și obiectivele de design. Prioritățile comune includ încărcare mai rapidă, temperatură de suprafață mai scăzută, reducerea EMI-ului sau menținerea performanței sistemului în timpul încărcării.
• Încărcătoare liniare
• Încărcătoare cu comutare
• Moduri de power-bank/OTG
Seleția se reduce adesea la bugetul termic, constrângeri de reglementare sau de interoperabilitate și dacă dispozitivul se așteaptă să mențină performanța maximă în timpul încărcării fără a părea lent sau a funcționa incomod cald.
Comutatoarele de sarcină sunt utilizate frecvent pentru a controla șinele pentru reducerea puterii în așteptare și pentru a izola domeniile în timpul unor stări de defect sau de transport. eFuse-urile adaugă limite de curent programabile, temporizatoare de defect și comportament controlat la pornire.
În multe produse, aceste blocuri își recuperează suprafața de plăci transformând modurile de eșec dezordonat, scurtcircuitele conectorilor, greșelile de accesoriu, evenimentele de conectare greșite, în incidente conținute în loc de resetări în cascadă sau daune fizice care sunt costisitoare de diagnosticat și și mai greu de reprodus.
Sistemele de afișare necesită adesea multiple șine de alimentare, cum ar fi AVDD, VGH și VGL, cu secvențiere de pornire atent controlate pentru a evita artefactele vizibile de afișare. Conducătorii LED trebuie să regleze curentul cu acuratețe și să răspundă fiabil la defectele de circuit deschis și scurtcircuit deoarece aceste condiții apar frecvent în timpul funcționării.
Conducătorii de porți și etapele de putere mai mare devin din ce în ce mai relevante în robotică, automotive și echipamente industriale, unde controlul motorului și conversia la voltaj mai mare se intersectează cu coordonarea în stil PMIC, telemetrie și politici de protecție.
PMIC-ul Tipic „Telefon/IoT”
În multe telefoane și module IoT compacte, un PMIC este cel mai bine înțeles ca un amestec deliberat de blocuri, mai degrabă decât o singură categorie. Integrarea este de obicei destinat să reducă aria PCB-ului, să simplifice secvențierea și să ofere firmware-ului un singur loc pentru a observa și influența comportamentul energetic.
• Convertizoare buck de înaltă eficiență multiple pentru CPU, GPU, memorie și șine mereu active
• Unul sau mai multe LDO-uri pentru șine analogice și RF cu zgomot scăzut
• Circuită de încărcător și cale de alimentare pentru coordonarea USB și baterie
• Monitoare, secvențiere, controale termice și raportare de întreruperi pentru telemetrie și gestionarea defectelor
Ceea ce tinde să domine rezultatele este interacțiunea rail-urilor. Un buck transient poate cupla într-un RF LDO prin impedanța comună de pământ. Împingerea termică a încărcătorului poate reduce liniștit curentul disponibil al sistemului, iar această schimbare poate trage un rail central în cădere în timpul unei spike de sarcină. Proiectele care evaluează fiecare bloc în izolare arată adesea curate în testarea inițială pe bancă și apoi devin complicate în timpul testării incluse de stres, când totul comută, se încălzește și negociază simultan.
Selectare și Integrare
Regulatoarele de comutare sunt de obicei alese pentru a reduce disipația, totuși pot introduce ripple și EMI care se răspândesc în domenii sensibile. LDO-urile calmează adesea zgomotul, dar costul se arată sub formă de căldură atunci când spațiul de tensiune este generos sau curentul este nerelevant.
• Regulatoare de comutare: eficiență mai mare, mai multă muncă de gestionare a ripple/EMI
• LDO-uri: zgomot mai mic, disipare de căldură mai mare când scade tensiunea
Un compromis care funcționează frecvent bine este utilizarea unui buck pentru a crea un rail intermediar, apoi utilizarea unui LDO pentru rail-ul final sensibil, cu condiția ca spațiul de tensiune și comportamentul termic să fi fost planificate în mod deliberat în loc să rămână după alte decizii.
Schimbările rapide de sarcină necesită bucle de control rapide, design adecvat al compensației și capacitate de ieșire suficientă pentru a menține reglarea stabilă în primele microsecunde de reacție. Selectarea condensatorilor implică mai mult decât simpla creștere a capacității. Capacitatea efectivă poate scădea din cauza polarizării DC, schimbărilor de temperatură și îmbătrânirii. ESR și ESL afectează, de asemenea, stabilitatea circuitului, reacția transiantă și performanța EMI, făcându-le considerații importante în design.
Echipele care validează cu dielectricul de condensator exact, tensiunea nominală și dimensiunea carcasei intenționate pentru producție tind să evite surprizele de stabilitate în etapele tardive, mai ales când lanțurile de aprovizionare impun substituții echivalente care sunt doar echivalente pe hârtie.
Comportamentul PMIC-ului sub defect poate fi proiectat în jurul unor filosofii diferite. O abordare încearcă degradarea elegantă, gestionarea brownout-ului, indicii de throttling pentru procesor, eliminarea selectivă a rail-urilor, astfel încât sistemul să rămână utilizabil într-un mod redus. O altă abordare impune oprirea deterministă pentru a ajunge rapid într-o stare sigură cunoscută.
• Degradare elegantă: adesea aliniată cu obiectivele experienței utilizatorului în produsele de consum
• Oprire deterministă: adesea aliniată cu comportamentul predictibil în design-urile orientate spre siguranță
PMIC-ul care se potrivește cel mai bine este de obicei acela al cărui secvențiere și răspunsuri la defecte se potrivesc comportamentului destinat al produsului, nu cel care se dovedește să anunțe cea mai lungă listă de verificare.
Frecvențele de comutare mai mari și etapele de putere cu bandgap larg cresc densitatea de putere realizabilă, dar creează și cerințe mai stricte pentru aranjarea PCB-ului și o sensibilitate mai mare la EMI. În același timp, caracteristicile software-ului, cum ar fi telemetria, întreruperile, funcțiile de jurnalizare și politicile de control programabile devin factori importanți în managementul și integrarea sistemului de putere.
PMIC-urile care mențin un comportament de putere predictibil sub sarcini reale pot reduce considerabil timpul de depanare, mai ales în sistemele care gestionează radiouri, procesoare, operarea încărcării și limitele termice simultan.
Domeniul de aplicare al PMIC
PMIC-urile apar oriunde energia electrică trebuie să fie convertită, distribuită, secvențiată, observată și protejată în timp ce se mențin pierderile și interferențele sub control. Sunt utilizate în mod obișnuit în aplicații de consum, întreprindere, automotive și industriale, totuși linia de demarcație de obicei nu este piața finală, ci ceea ce arată arborele de energie în practică. În momentul în care un produs conține multiple rail-uri cu toleranțe la zgomot diferite, comportamente de sarcină diferite și așteptări diferite la defecte, PMIC-ul nu mai simte ca o „alegere de componentă” și începe să acționeze ca o forță modelatoare asupra comportamentului sistemului. În multe proiecte reale, odată ce un procesor performant este asociat cu radiouri, senzori, memorie și I/O de mare viteză, arhitectura de putere ajunge să limiteze ceea ce platforma poate livra constant, chiar și atunci când computația și software-ul arată solid pe hârtie.
Acolo unde comportamentul PMIC limitează rezultatele sistemelor din lumea reală
Răspunsul la sarcina tranzientă care stabilește linia de maxim
CPU-urile și GPU-urile moderne trag pași abrupți de curent în timpul activităților de boost și burst, iar acești pași pot fi surprinzător de neiertători. Când bucla de control a PMIC-ului, capacitatea de ieșire și impedanța de distribuție nu pot menține rail-ul în limite strânse, echipele software adesea răspund în moduri care sunt subtile dar costisitoare: scurtează feroneriile de boost, reduc ceasurile de vârf sau introduc benzi de protecție mai largi pentru ca defecțiunile să nu apară în câmp. Din punct de vedere ingineresc, acel schimb poate părea frustrant deoarece platforma poate părea eficientă, lăsând totuși performanța pe masă în condiții realiste de circulație.
Echipele care validează doar cu sarcini statice sau modele de laborator ordonate tind să învețe acest lucru prea târziu. Sarcinile reale creează margini zimțate: explozii scurte de jocuri, vârfuri de inferență AI și evenimente de coexistență radio pot produce scăderi de tensiune care nu apăreau niciodată când calea era testată cu un profil benign de banc. Lecția incomodă este că comportamentul repetabil tranzitor sub sarcini nestructurate cumpără adesea mai multă performanță utilizabilă decât urmărirea unui număr de eficiență flatant la un singur punct de funcționare.
Ripple și zgomotul de bandă largă care se transformă în datorie de integritate a semnalului
Ripple nu ar trebui să fie tratat doar ca un parametru de performanță analogic. Harmonicile de comutație și zgomotul de bandă largă pot afecta rezoluția ADC, pot crește zgomotul de fază RF și pot reduce marja semnalului SERDES, mai ales când liniile de putere împărtășesc căile de returnare sau se cuplează prin inductanța pachetului și PCB-ului. O linie de putere care pare curată în testarea cu o singură linie poate se comporta foarte diferit aproape de interfețe de mare viteză, antene sau secțiuni de memorie dense.
Realitățile layout-ului schimbă, de asemenea, povestea. Constraintările mecanice și regiunile de excludere forțează compromisuri, iar aceste compromisuri pot amplifica căile de cuplare care erau invizibile într-un layout ideal. În practică, o soluție de putere își câștigă încrederea atunci când rămâne stabilă și liniștită sub plasament imperfect și rutare non-ideală, nu doar atunci când este măsurată într-o configurație de demonstrație în cele mai bune condiții.
Pornire și secvențiere care modelează rezultatele fiabilității
Ordinea de alimentare și comportamentul de rampă decid dacă antrenarea memoriei se finalizează constant, radio-urile se calibrează fără eșecuri ciudate la colțuri și domeniile mereu-active rămân stabile în timpul căderilor de tensiune. Secvențierea marginală produce adesea tiparul de eșec care consumă timp și moral: „una din cincizeci de boot-uri”, greu de reprodus și chiar mai greu de depanat odată ce sistemul este complet integrat.
Secvențierea tinde să funcționeze mai bine atunci când este tratată ca parte a comportamentului de resetare și recuperare, mai degrabă decât ca o listă de verificare tardivă. Proiectările care rezistă în producție tratează de obicei întreaga cale de alimentare/pornire ca pe o mașină de stări repetabilă, apoi o dovedește sub ratele de rampă în cele mai nefavorabile condiții, temperaturi reci și condiții de baterie scăzută. Ciclarea automată a puterii este adesea locul unde se câștigă încrederea, pentru că expune marginile intermitente pe care câteva comutări manuale de putere nu le dezvăluie niciodată.
Criterii de selecție ca spațiu de compromis de sistem
Eficiență evaluată în funcție de moduri, nu ca un număr trofeu
Eficiența își schimbă semnificația în funcție de modul în care produsul își petrece efectiv timpul. Eficiența în vârful sarcinii poate părea impresionantă în specificații, dar durata efectivă a bateriei și performanța termică depind de multe condiții de funcționare, inclusiv procesarea pe burst, sarcină normală, sarcină ușoară și funcționare în modul de repaus profund. Pierderile de comutare, pierderile de conducție și curentul de repaus concurează diferit în fiecare regiune, iar „câștigătorul” se schimbă în funcție de profilul sarcinii.
Pentru proiectele alimentate de baterie, Iq scăzut și eficiența puternică în sarcină ușoară apar adesea direct ca un timp mai lung între încărcări, ceea ce echipele de produs tind să le preocupe într-un mod foarte concret. Pentru servere și echipamente de rețea, pierderile de conducție și constrângerile termice domină de obicei deoarece curentul susținut și eliminarea căldurii devin realitatea zilnică. O modalitate bine fundamentată de a decide este să corelezi țintele de eficiență cu distribuția temporală a sarcinilor, în loc să optimizezi un punct de funcționare care aproape nu apare niciodată pe teren.
Rezerva termală care împiedică colapsul performanței sub căldură
Limitele termice definesc frecvent curentul maxim sustenabil, care la rândul său definește calculul maxim susținut. Un PMIC poate arăta electric excelent și să rateze totuși obiectivele sistemului dacă pachetul, cuprul și plasarea sa creează puncte fierbinți locale aproape de memorie, cutii de protecție sau blocuri RF sensibile la temperatură. În asamblări reale, creșteri mici de temperatură pot declanșa comportamente de derating, praguri de protecție sau preocupări legate de fiabilitate pe termen lung pe care nimeni nu vrea să le explice după lansare.
Proiectările care îmbătrânesc bine planifică de obicei pentru rezervele termice. Această planificare apare adesea sub formă de caracteristici termice ale pachetului care se potrivesc cu sarcina, capacitate multi-fază atunci când profilul de curent o justifică și o strategie de layout care împrăștie căldura, păstrând în același timp buclele de curent scurte suficiente pentru a evita transformarea soluțiilor termice în probleme de zgomot.
Constrângeri EMI care umflă costurile programului și iterației
Frecvența de comutare, ratele de vârf și topologia de control influențează puternic dacă EMI poate fi gestionată cu filtrare simplă sau devine un ciclu de rotații ale plăcii și sesiuni de laborator până târziu în noapte. Conformitatea cu fișa tehnică este doar o parte a poveștii; sensibilitatea layout-ului poate domina rezultatele. O soluție care necesită geometria buclei aproape perfectă poate deveni un pariu atunci când constrângerile mecanice forțează plasamente incomode.
Multe echipe ajung să prefere o soluție ușor mai lentă, mai controlabilă, una cu rate de variație gestionabile și comportament spectral predictibil, deoarece reduce timpul de depanare și scade riscul de certificat. Această alegere poate părea conservatoare, dar se aliniază adesea cu realitatea că problemele EMI tind să apară târziu, când programul este cel mai puțin iertător.
Caracteristici de protecție care definesc experiența de defect și comportamentul de serviciu
Comportamentul de protecție afectează puternic reacția sistemului în condiții de defect. Setările OCP, OVP, OTP și protecția la scurtcircuit pot determina dacă sistemul efectuează o oprire curată, intră în modul de întrerupere sau repornește în mod repetat cu un comportament instabil. Aceste răspunsuri afectează direct dificultatea de depanare, cerințele de suport și percepția globală a fiabilității produsului.
Setările de protecție interacționează de asemenea cu evenimentele normale de operare. Limitarea agresivă a curentului poate reduce riscul de daune, dar poate declanșa și resetări repetate în momente de creștere bruscă a curentului sau în vârfuri de pornire. Gestionarea defectelor funcționează de obicei cel mai bine atunci când este ajustată ca parte a strategiei de serviciu intenționate, decidând ce ar trebui să reîncerce, ce ar trebui să se mențină, ce ar trebui să se înregistreze și ce ar trebui să eșueze rapid, mai degrabă decât să fie lăsate ca valori implicite în registru.
Cost de integrare care include firmware, validare și realitatea depanării
Costul de integrare rareori se oprește la BOM și zona PCB. Include lucrări de firmware, domeniul de validare, timpul de testare, robustețea procesului de fabricație și sarcina de depanare atunci când ceva nu se comportă conform așteptărilor. PMIC-urile foarte integrate pot reduce numărul de componente, ceea ce este atrăgător, dar de asemenea concentrează riscul: o ajustare tardivă pe un canal poate declanșa re-înregimentarea unei porțiuni mai mari a arborelui de alimentare decât a planificat echipa.
Abordările mai discrete pot crește efortul de aranjare și gestionarea componentelor, dar pot oferi modularitate și o substituție mai ușoară dacă condițiile din lanțul de aprovizionare se schimbă sau dacă actualizările la mijlocul vieții sunt de așteptat. Lentila de selecție mai onestă este apetitul de risc al programului: sensibilitatea la program, numărul de iterații așteptat și cât de frecvent este probabil ca designul să fie revizuit după prima lansare.
Caracteristici de energie digitală: flexibilitate care vine cu condiții
Telemetria, canalele programabile și scalarea dinamică a tensiunii pot aduce avantaje reale: optimizare a puterii mai strânsă, diagnostice clare de defect și scalarea performanței adaptative care urmărește sarcina de lucru și temperatura. În același timp, aceste caracteristici implică dependențe de firmware, controlul configurației, disciplina programării de producție și moduri de defectare complet noi care nu există în configurații analogice mai simple. Telemetria devine valoroasă doar atunci când datele colectate sunt folosite activ pentru monitorizare și decizii de design în loc să rămână neutilizate în tablourile de diagnosticare.
Dintr-un punct de vedere practic, puterea digitală își justifică existența atunci când închide un circuit măsurabil. Dacă programabilitatea poate fi folosită pentru a recupera randamentul, a extinde durata de viață a bateriei sau a preveni limitarea termică cu politici controlate, devine un levier puternic. Dacă este activată pur și simplu pentru că este disponibilă, adesea se transformă în suprafață de configurație neutilizată care complică validarea, crește riscul unei configurări greșite în timpul fabricației și creează ambiguitate în legătură cu ce setări sunt cu adevărat intenționate.
Un flux de selecție și validare practică care urmărește comportamentul sistemului
Un flux de lucru care tinde să reziste sub presiune începe din obiectivele de comportament ale sistemului, mai degrabă decât să scaneze un catalog PMIC și să spere că se potrivește mai târziu. Împarte problema în bucăți concrete, testabile și forțează claritate despre ce înseamnă un comportament bun înainte de activarea plăcii.
• Convertiți transienții sarcinii de lucru în cerințe pentru canale (frecvență acceptabilă, timp de stabilizare, curent maxim, rată de repetare).
• Definiți bugete de zgomot pentru blocuri sensibile (ADC, PLL, SERDES, RF) și le mapați la limitele de ondulație și presupunerile de aranjare.
• Specificați secvențierea, dependențele de resetare și recuperarea la scăderi ca o singură mașină de stări.
• Evaluați riscul EMI devreme, folosind constrângeri realiste de plasare și abordarea de shielding intenționată.
• Validați comportamentul de protecție cu injecții de defect care seamănă cu scurtcircuitele reale, evenimentele de cablare și scăderea bateriei.
ADC / PLL / SERDES / RF
Acest stil de abordare reduce surprizele în stadiul final, deoarece tratează PMIC-ul ca mecanismul care guvernează comportamentul puterii la nivel de sistem, nu ca o utilitate de fundal. Când puterea este proiectată ca un subsistem de primă clasă, performanța devine mai constantă, fiabilitatea devine mai ușor de apărat cu date, iar munca de conformitate tinde să fie mai predictibilă, în timp ce echipa petrece mai puțin timp urmărind defectele intermitente care își au origine în canale, mai degrabă decât în logică sau software.
Direcții viitoare pentru PMIC-uri
Densitatea de putere mai mare și tensiunile de nucleu mai mici lasă PMIC-urile să regleze cu un spațiu electric mai strâns și cu o toleranță mai mică pentru întârziere. Pe măsură ce liniile de alimentare se situează mai aproape de punctul minim de operare al unei sarcini digitale, chiar și o ușoară scădere poate apărea ca erori subtile, resetări sau restricționări de performanță care se simt „misterios” în timpul aducerii sistemului la viață. Acest lucru îndepărtează treptat atenția de la cât de precis arată o linie într-o stare de statică și se îndreaptă către cum se comportă aceasta în timpul evenimentelor de sarcină rapid schimbătoare, în cele mai rele condiții.
Echipele se confruntă adesea cu o realitate inconfortabilă: un circuit care pare calm pe bancă poate să se comporte prost în produs odată ce sarcinile reale creează pași rapizi de sarcină, puncte fierbinți localizate și distribuirea inegală a curentului de fază. Un model mai rezilient este să tratezi proiectarea circuitului, alegerile etapei de alimentare și impedanța PDN ca pe un singur sistem cuplate, apoi să verifici comportamentul folosind semnături reprezentative ale sarcinii de lucru în loc de impulsuri curate și idealizate.
Transienții mai rapizi trag în mod natural proiectele către bucle mai strânse, însă buclele mai strânse fac proiectele mai expuse la inductanța parazitară, acumulările de toleranță și zgomotul de detecție care este ușor de subestimat la început. În multe programe, diferența dintre stabil și stabil în câmp provine din modelarea îmbunătățită a semnalelor mici, detecția curentului credibil și compensarea care este ajustată cu conștientizarea realului aranjament.
Creșterea frecvenței de comutare poate ajuta, dar nu se traduce automat în comportament mai bun în tranzient dacă calea de detecție și geometria PCB-ului nu pot susține lățimea de bandă adăugată. Când apare această nepotrivire, câștigul buclei este cheltuit amplificând zgomotul, ceea ce poate apărea ca comutare instabilă, artefacte audibile în anumite moduri de funcționare sau vârfuri EMI care apar doar după integrarea mecanică.
Blocurile moderne de calcul și conectivitate generează o cerere care este explozivă și compozițională, astfel că validarea în tranzient reflectă din ce în ce mai mult ceea ce fac de fapt software-ul și radiourile, mai degrabă decât ceea ce poate aproxima o cutie de sarcină cu un singur pas.
Multe echipe converg spre un flux de lucru care combină:
• Pasaje de sarcină în laborator
• Jurnale de telemetrie ale platformei
• Actualizări iterative ale alegerilor de compensare și decuplare.
Această abordare tinde să reducă surprizele în etapele târzii, în special atunci când limitele termice modifică lent comportamentul electric și schimbă marjele în timp.
Presiunea de a reduce dimensiunea în timp ce se îmbunătățește performanța extinde integrarea în pachet și structura înconjurătoare, nu doar în die. Ambalarea avansată și pasivele încorporate pot scurta buclele cu di/dt ridicat, reduce parazitismul și restrânge răspunsul în tranzient în moduri care se simt imediat măsurabile în timpul depanării. Magneticele integrate pot ridica și mai mult densitatea de putere, dar beneficiul este adesea limitat de căile termice, constrângerile mecanice și modul în care cuplarea se schimbă odată ce designul este în interiorul închiderii sale reale.
În produsele desfășurate, cele mai durabile câștiguri din integrare provin frecvent din reducerea sensibilității la variațiile de construcție și stabilizarea performanței în cadrul dispersiei de fabricație, mai degrabă decât din simpla reducere a listei de materiale.
Selectarea pachetului reflectă din ce în ce mai mult rezultatele electrice și termice, inclusiv inductanța mai mică a buclei, îmbunătățirea dispersiei căldurii și controlul impedanței mai predictibil. O lecție comună din teren este că două plăci care împărtășesc același schematic pot diverge brusc în comportament atunci când un design păstrează o buclă de curent compactă, iar celălalt dispersează calea de putere pe PCB.
Pe măsură ce integrarea sistemului crește, planificarea aranjamentului este adesea prioritizată mai devreme în dezvoltare deoarece modificările ulterioare ale componentelor nu pot corecta întotdeauna problemele cauzate de geometria slabă sau rutele PCB.
Magneticele integrate pot crește eficiența la frecvențe mai mari și reduce înălțimea z, ceea ce este atractiv în produsele compacte. În același timp, pot introduce căi de cuplare noi și crea puncte fierbinți termice care sunt greu de detectat până la prototipuri tardive. Proiectele care decurg fără probleme își tratează de obicei inductoarele și pachetele ca o temă combinată de co-proiectare EMI și termică, incluzând deciziile de plasare în apropierea antenelor, a legăturilor de mare viteză și a senzorilor sensibili.
Practica EMI tinde să se îndepărteze de mitigările pur statice și să se îndrepte spre strategii de control care anticipează condițiile de operare. Tehnicile precum modularea cu spectru răspândit, conducerea mai inteligentă a porților și detecția mai bogată pe cip pot reduce vârfurile, dar necesită și coordonare pentru a evita pur și simplu schimbarea emisiilor de vârf pentru zgomot cu bandă largă sau interferențe radio.
Multe echipe au văzut desfășurarea secvenței: verificările EMI din primele etape trec, apoi construcțiile ulterioare eșuează când mai mulți regulatoare comută în modele corelate, când un nou program firmware schimbă timpul de lucru sau când cablurile și scuturile schimbă căile de returnare. Aceste experiențe îndreaptă gândirea EMI către nivelul platformei, mai degrabă decât să trateze fiecare regulator ca pe o cutie izolată.
Pe măsură ce marginea de comutare devine mai rapidă, controlul dv/dt influențează din ce în ce mai mult atât emisiile, cât și stresul pe termen lung. Conducătorii de porți adaugă mai multă programabilitate, iar logica de protecție devine mai conștientă de context, ceea ce poate face ca reglarea să se simtă mai mult ca inginerie de sistem decât ca selecție de componente.
O obișnuință practică care economisește timp este să reglăm ratele de margine folosind măsurători efectuate în configurația mecanică finală, deoarece ecranele, cablajele și structurile de pământ schimbă adesea rezultatul EMI în moduri pe care o placă goală nu le dezvăluie.
Detectarea îmbunătățită pe cip permite comportamente adaptive, cum ar fi schimbarea comportamentului de comutare atunci când emisiile se apropie de o limită sau când modul de funcționare se schimbă. În timp, aceasta îndrumă PMIC-urile de la comportamente cu funcție fixă la subsisteme gestionate care negociază continuu performanța, zgomotul și condițiile termice pe baza feedback-ului și nu a presupunerilor.
Sistemele alimentate de baterii continuă să urmărească curentul de repaus ultra-scăzut și eficiența mare la sarcină ușoară folosind tehnici precum funcționarea PFM/burst, emularea diodei și selecția automată a modului. Tensiunea emoțională pe care multe echipe o recunosc este că aceleași moduri de sarcină ușoară care arată grozav pe o fișă de date pot introduce ripple, artefacte audibile sau semnături EMI intermitente care se observă imediat, chiar dacă eficiența medie arată excelent.
Pentru a reduce ambiguitatea, echipele definesc din ce în ce mai mult ce înseamnă un comportament de standby acceptabil în termeni concreți, apoi aleg strategia de mod pentru a se potrivi.
Obiectivele specificate frecvent includ:
• Limitele de ripple în somn/standby
• Latența de trezire
• Constrângerile acustice/zgomot
• Comportamentul EMI în timpul activităților periodice de întreținere.
În practică, durata de viață a bateriei în cicluri de lucru realiste povestește adesea povestea mai fiabil decât cifrele de eficiență maximă, în special atunci când ciclul de lucru include somn, trezire periodică, impulsuri radio și eșantionare a senzorilor.
Comutarea automată a modului este atractivă, dar tranzițiile pot crea scurte deranjuri care dispar în măsurătorile medii și apar doar ca resetări rare sau plângeri de zgomot intermitent. Proiectele care se simt „solide” pe teren tind să investească un efort suplimentar de validare exact la limitele dintre PFM și PWM, inclusiv secvențierea trezirii, întârzierile de secvențiere și pașii de sarcină la condiții limită.
Un model repetat este acela că cea mai agresivă setare de eficiență nu este întotdeauna cea mai confortabilă alegere de produs atunci când produce ripple care variază în funcție de condiții sau cuplaj de zgomot care este dificil de reprodus. Multe echipe ajung să aleagă o configurație care renunță la o mică cantitate de eficiență în schimbul unui comportament care este repetabil în funcție de temperatură, variația de construcție și scenarii, ceea ce scade adesea riscul de integrare și reduce churn-ul de suport.
Pe măsură ce platformele de calcul se scalabilizează, acestea se bazează din ce în ce mai mult pe telemetrie precisă, scalarea adaptivă a tensiunii și protecție care este coordonată între multe linii. Telemetria joacă un rol practic în ingineria zilnică: poate scurta perioada de activare, accelera analiza cauzelor rădăcină și reduce tentația de a supra-proiecta „pentru orice eventualitate” prin dezvăluirea locului în care se află, de fapt, marja.
Telemetria tinde să conteze cel mai mult atunci când condițiile se schimbă rapid, nu atunci când linia este stabilă și ușor de măsurat. Viitoarele PMIC-uri vor îmbunătăți probabil comportamentul de eșantionare, alegerile de filtrare și alinierea temporală astfel încât deciziile software să urmărească realitatea mai îndeaproape.
O nuanță pe care echipele experimentate tind să o aprecieze este că mai multe eșantioane nu sunt automat mai utile; consistența, stabilitatea calibrării pe timp de temperatură și definițiile clare ale lățimii de bandă și latenței decid adesea dacă datele pot fi acționate cu încredere.
Odată cu mai multe linii apare o nevoie mai mare de comportament de protecție coordonat pentru ca sistemul să răspundă coerent și nu linie cu linie.
Coordonarea protecției se extinde adesea la:
• Comportamentul de răspuns OCP
• Comportamentul de răspuns OVP
• Comportamentul de răspuns UVP
• Comportamentul de răspuns OTP
• Dependențele de secvențiere
• Politicile de recuperare în caz de defect
• Partajarea stării între PMIC-uri
Sistemele reale eșuează frecvent nu pentru că o caracteristică lipsește, ci pentru că liniile răspund diferit la același eveniment, producând cascade de brownout sau bucle de repornire care sunt frustrante de diagnosticat. O abordare coordonată de gestionare a defectelor, statut partajat plus un plan de recuperare unificat, se potrivește mai bine cu modul în care platformele sunt așteptate să se comporte sub stres.
Adoptarea GaN și SiC va crește în zonele în care frecvența de comutare și eficiența schimbă în mod semnificativ dimensiunea sau performanța. Comutarea mai rapidă poate micșora componentele magnetice și poate îmbunătăți răspunsul tranzitor, dar, de asemenea, crește tensiunea legată de dv/dt, sensibilitatea EMI și cerințele pentru proiectarea driverului de poartă și strategia de izolare. Constrângerile nu sunt pur electrice; ele implică, de asemenea, limite de operare în cadrul variațiilor de fabricație și scenarii de utilizare greșită din lumea reală pe care echipele au învățat să le ia în serios.
Soluțiile GaN și SiC tind să recompenseze controlul precis al driverului de poartă, layout-ul disciplinat și schemele de protecție care previn suprasarcina, oscilațiile și activarea neintenționată. O idee practică care apare repetat este că calitatea layout-ului poate domina selecția dispozitivelor; un layout bine realizat cu un dispozitiv „modest” poate depăși un dispozitiv premium plasat într-un circuit inductiv zgomotos.
Pe măsură ce vitezele de comutare cresc, opțiunile de izolare și limitele de fiabilitate pe termen lung devin mai evidente în revizuirile de proiectare și planificarea calificării. Adoptarea accelerează de obicei acolo unde câștigurile de performanță justifică în mod clar un rigor stricte în proiectare, în timp ce produsele sensibile la costuri sau sensibile la zgomot se mișcă adesea cu mai multă precauție și cer dovezi clare ale beneficiului la nivel de sistem.
PMIC-urile sunt din ce în ce mai mult modelate pentru a se comporta ca executori de politici care arbitrează eficiența, zgomotul, termicele și fiabilitatea în timp real. Arhitecturile care tind să îmbătrânească bine tratează puterea ca o resursă gestionată: telemetria PMIC informează politica software, iar politica software, la rândul ei, ajustează modurile de operare ale PMIC și comportamentul rămâi. Aceasta estompează limita dintre proprietatea hardware și firmware într-un mod care poate părea incomod la început, dar adesea compensează prin reducerea acumulării de marje și îmbunătățirea rezilienței sub sarcini reale.
Concluzie
Protecția eficientă a circuitelor depinde de mai mult decât adăugarea unei părți de protecție unice. Proiectele fiabile necesită o coordonare corespunzătoare între devierea supratensiunii, limitarea tensiunii, limitarea curentului, împământarea, layout-ul și sincronizarea defectelor. Fiecare dispozitiv de protecție are propriile puncte forte și limite, așa că selecția trebuie să se potrivească cu tipul de defect, nivelul de energie, viteza de reacție și mediu operațional așteptat. O strategie de protecție bine planificată îmbunătățește siguranța, reduce riscul de defectare și sprijină fiabilitatea pe termen lung în sistemele electronice din lumea reală.
Întrebări frecvente (FAQ)
1. De ce este un PMIC considerat un coordonator de putere la nivel de sistem în loc de a fi doar un regulator de tensiune?
Un PMIC face mult mai mult decât a converti o tensiune într-alta. Gestionează cum sunt generate, secvențiate, monitorizate, distribuite și protejate multiple rânduri în întregul sistem. În proiectele practice, PMIC-ul coordonează rândurile de procesor, sursele de memorie, secțiunile RF, senzorii și domeniile periferice, tratându-le de asemenea și momentul de pornire, recuperarea în caz de defect, evenimentele termice și semnalizarea de bună funcționare. Deoarece toate aceste comportamente interacționează în timpul pornirii și a funcționării în timp real, PMIC-ul devine adesea unul dintre principalii factori care influențează fiabilitatea și stabilitatea sistemului.
2. De ce defectele legate de PMIC apar adesea doar sub sarcini reale în loc de a apărea în timpul testării simple în laborator?
Testarea pe bancă cu sarcini statice reproduce rar comportamentul rapid tranzitoriu generat de procesoare moderne, emițătoare RF, traficul de memorie și rafale de senzori. În condiții realiste de funcționare, rândurile experimentează vârfuri bruște de curent care expun slăbiciuni în răspunsul tranzitor, parazitii PCB, ajustarea compensației și stabilitatea rețelei de ieșire. Un PMIC poate părea stabil în timpul testării controlate, dar ulterior poate arăta o scădere, o suprasarcină, oscilații sau defecțiuni de secvențiere odată ce sarcinile reale creează o cerere electrică rapid schimbătoare.
3. De ce secvențierea puterii este tratată ca un contract la nivel de sistem în loc de a fi o simplă caracteristică de pornire?
Multe sisteme digitale necesită relații temporale specifice între rândurile de bază, rândurile de memorie, sursele de I/O, semnalele de resetare și domeniile mereu active. Dacă rândurile cresc în ordinea greșită sau cu un moment temporal incorect, procesoarele, blocurile de retenție SRAM și interfețele de mare viteză pot intra în stări de operare nedefinite. Aceste probleme creează adesea eșecuri intermitente la pornire care apar doar în timpul extremelor de temperatură, întreruperi de curent sau condiții de conectare a bateriei. Prin urmare, secvențierea corectă devine un acord coordonat între cerințele hardware, firmware și siliciu, mai degrabă decât o caracteristică de conveniență.
4. De ce răspunsul tranzitoriu al PMIC poate limita discret performanța reală a CPU-urilor și GPU-urilor?
Procesoarele moderne generează pași bruşti de curent în timpul funcționării cu amplificare, sarcinilor de lucru AI, exploziei de jocuri și activității radio. Dacă PMIC nu poate menține o tensiune stabilă în timpul acestor evenimente, firmware-ul poate reduce durata amplificării, poate scădea viteza de clock sau poate lărgi marjele de sincronizare pentru a preveni prăbușirile. În multe produse, limitările de livrare a energiei limitează în tăcere performanța sustenabilă, chiar dacă procesorul în sine pare capabil pe hârtie. Răspunsul stabil la transient are adesea mai multă influență asupra performanței utilizabile a sistemului decât specificațiile de eficiență maximă singure.
5. De ce creează unda și zgomotul de comutare de la PMIC probleme mult mai mari decât subsistemul de putere în sine?
Harmonicile de comutare și zgomotul de bandă largă pot cupla în circuite RF, referințe ADC, PLL-uri, linkuri SERDES și căi analogice sensibile prin impedanța de pământ partajată și paraziții PCB-ului. Chiar și nivelurile relativ mici de undă pot reduce precizia ADC-ului, pot crește zgomotul de fază, pot restrânge marja de sincronizare sau pot degrada fiabilitatea comunicațiilor de mare viteză. O linie care arată electric acceptabilă în izolare poate crea probleme serioase de integritate a semnalului odată ce este integrată în sisteme mixte dense de semnal.
6. De ce limitele termice ale PMIC-ului definesc frecvent performanța maximă susținută de calcul?
Pe măsură ce temperatura PMIC-ului crește, eficiența scade iar mecanismele de protecție termică pot începe să reducă curentul disponibil sau să activeze comportamentul de reducere. În sistemele compacte, punctele fierbinți localizate aproape de procesoare, memorie sau secțiuni RF pot forța PMIC-ul în derating termic cu mult înainte ca limitele electrice teorice să fie atinse. Din acest motiv, performanța sustenabilă a sistemului depinde adesea la fel de mult de aranjamentul termic, dispersia cuprului și selecția pachetului ca și de specificațiile regulatorilor în sine.
7. De ce inginerii combină frecvent convertoare buck cu regulatoare LDO în designuri sensibile?
Convertoarele buck oferă o reducere eficientă a tensiunii pentru linii de curent mare, dar introduc undă de comutare și EMI. LDO-urile generează o tensiune de ieșire mult mai curată, cu zgomot mai mic, dar disipează mai multă căldură când scad tensiuni mai mari. Un compromis comun folosește un convertor buck pentru a genera o linie intermediară eficient, urmat de un LDO pentru a curăța alimentarea finală analogică sau RF sensibilă. Această combinație echilibrează eficiența, gestionarea termică și reducerea zgomotului mai eficient decât se bazează pe orice topologie singură.
8. De ce politicile de răspuns la defectele PMIC sunt considerate parte a experienței generale a produsului?
Comportamentul în caz de defect determină dacă produsul se oprește curat, intră într-un ciclu de repornire, își reduce viteza elegant sau devine instabil în condiții anormale. Protecția la supraîncărcare, oprirea termică, gestionarea tensiunii scăzute și temporizarea recuperării influențează direct modul în care experiențele defectelor bateriilor, problemele cablurilor sau evenimentele de suprasarcină sunt percepute. Politicile PMIC bine concepute izolează defecțiunile în mod previzibil și se recuperează în moduri controlate, reducând complexitatea serviciului și prevenind ca problemele minore să escaladeze în eșecuri la nivelul sistemului.
9. De ce PMIC-urile moderne se bazează din ce în ce mai mult pe telemetrie și politici de putere programabile?
Sistemele moderne schimbă dinamic sarcina de lucru, starea termică, activitatea radio și comportamentul de încărcare în timp real. Telemetria PMIC permite firmware-ului să monitorizeze continuu condițiile liniei, consumul de curent, temperatura și evenimentele de defect. Aceste date permit scalarea adaptive a tensiunii, gestionarea termică, throttling-ul inteligent și deciziile de protecție coordonate. Cu toate acestea, sistemele de putere programabile introduc, de asemenea, o nouă complexitate de validare deoarece o configurare greșită a firmware-ului poate crea eșecuri care nu există în designurile analogice fixe.
10. De ce modelele de PMIC din viitor se îndreaptă spre „orchestrarea puterii” în loc de simpla conversie a energiei?
PMIC-urile din viitor sunt din ce în ce mai așteptate să coordoneze eficiența, termicele, comportamentul EMI, protecția, scalarea sarcinii de lucru, politicile de încărcare și telemetria sistemului simultan. Tehnologiile de comutare mai rapide, marjele de tensiune mai stricte și sarcini de lucru extrem de dinamice necesită ca PMIC-ul să își adapteze continuu comportamentul pe baza condițiilor reale de operare, mai degrabă decât pe presupuneri statice. Această evoluție transformă PMIC-ul într-un subsistem de management activ care colaborează strâns cu firmware-ul și software-ul sistemului pentru a menține o funcționare stabilă, eficientă și predictibilă a platformei în condiții în schimbare.
Blog înrudit
-
Câte zerouri într -un milion, miliarde, trilioane?
![Câte zerouri într -un milion, miliarde, trilioane?]()
2024/07/29
Milioane reprezintă 106, o cifră ușor de înțeles în comparație cu articolele de zi cu zi sau cu salariile anuale. Miliarde, echivalent cu 109, ... -
Fisa de date IRLZ44N MOSFET, circuit, echivalent, pinout
![Fisa de date IRLZ44N MOSFET, circuit, echivalent, pinout]()
2024/08/28
IRLZ44N este un MOSFET de canal N-canal utilizat pe scară largă.Renumit pentru capacitățile sale excelente de comutare, este foarte potrivit pentr... -
Temperatura bateriei prea scăzută, încărcarea s -a oprit.Cum să -l rezolvi?
![Temperatura bateriei prea scăzută, încărcarea s -a oprit.Cum să -l rezolvi?]()
2024/10/6
Problemele de încărcare a bateriei pentru telefonul mobil sunt comune, dar pot fi gestionate eficient.Temperatura joacă un rol important în eficie... -
BC547 Ghid cuprinzător al tranzistorului
![BC547 Ghid cuprinzător al tranzistorului]()
2024/07/4
Tranzistorul BC547 este utilizat în mod obișnuit într -o varietate de aplicații electronice, de la amplificatoare de semnal de bază la circuite o... -
Ghid cuprinzător pentru SCR (redresor controlat de siliciu)
![Ghid cuprinzător pentru SCR (redresor controlat de siliciu)]()
2024/04/22
Redarele controlate de siliciu (SCR) sau tiristori joacă un rol pivot în tehnologia electronică a puterii, datorită performanței și fiabilităț... -
LR621, SR621SW, 364, AG1 Echivalenți și înlocuitori ai bateriei AG1
![LR621, SR621SW, 364, AG1 Echivalenți și înlocuitori ai bateriei AG1]()
2024/07/15
Bateriile cu butoane LR621 și SR621SW sunt predominante în dispozitive electronice compacte, precum ceasuri, jucării mici, calculatoare și tastele... -
Fundamentele circuitelor Op-Amp
![Fundamentele circuitelor Op-Amp]()
2023/12/28
În lumea complexă a electronicelor, o călătorie în misterele sale ne conduce invariabil la un caleidoscop al componentelor circuitului, atât raf... -
Un ghid complet pentru multiplexori și rolul lor în sistemele digitale
![Un ghid complet pentru multiplexori și rolul lor în sistemele digitale]()
2025/09/20
Multiplexoarele sunt componente în sisteme digitale, concepute pentru a canaliza semnale de intrare multiple într -o singură linie de ieșire folos... -
Compararea diferențelor și aplicațiilor NMOS și PMOS
![Compararea diferențelor și aplicațiilor NMOS și PMOS]()
2024/11/15
Înțelegerea diferențelor dintre tranzistoarele NMOS și PMOS este importantă în proiectarea circuitelor eficiente.NMOS (N-Type Metal-Oxid-Semomon... -
Comparație CR2450 vs CR2032: Tot ce trebuie să știți
![Comparație CR2450 vs CR2032: Tot ce trebuie să știți]()
2025/09/15
Baterii cu buton, cum ar fi CR2450 și CR2032, alimentează multe electronice de zi cu zi, de la ceasuri și telecomenzi la dispozitive medicale și i...










Piese Hot
- F03-2AA03LW
- R5F562T6ADFM#V3
- REF5025AID
- LT3680EDD#PBF
- 1812AC471KAT3A
- LMV7239M7X
- TC74VHC02F
- MX29LV160DBTI-70G
- MIC22400YML
- XC7K410T-1FFG676C
- MCC26-18IO8B
- LH1503AACTR
- M6759-A1FI
- AS4C256K16E0-50JC
- GCJ31CR72J153KXJ3L
- H5PS5162FFR-Y5I
- UC2844AD8
- BU6521KV-E2
- TWL4030C1ZXN
- ZXCT1020E5TA
- 71PL254JDOBFWTB
- DM74LS04MX
- CXD5053GG-T6
- 1808SC331KATME
- NC7SZ02M5X
- NB6L11DTR2G
- SM5312AV-G-ET
- GRM188R70J105MA01D
- TPSC476K010R0200
- TMS320DRI350AZTS5
- 06033A180JAT4A
- LH28F160BJB-TTLZU
- C2012C0G2W121K060AA
- ISL6554CB
- 08053A470KAT2A
- ACS770LCB-050B-PFF-T
- M29W256GL70ZS6E
- DRDNB21D-7
- GRM21BR71H683KA01K
- T491A105M025AG
- T491T106K006AT
- V300C24H150BL2
- AIH20B300N-L
- ADM9201ARS
- M3611-ALCA
- QT2025PRKDB-1
- MX29LV320CBTI-70
- SII9616CTUCTR
- LTM4668AEY#PBF
- VI-BAMD-EL